
Details
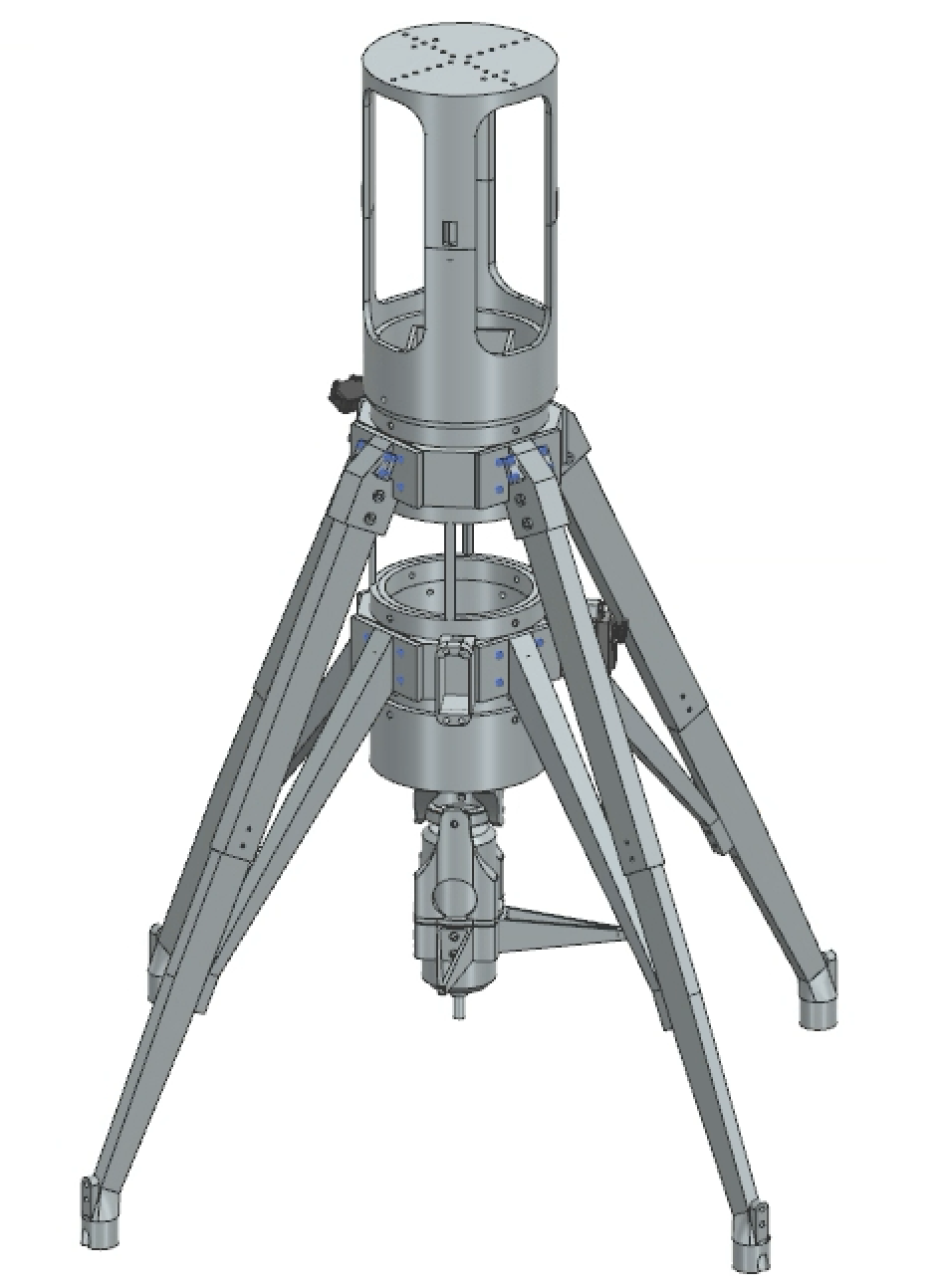
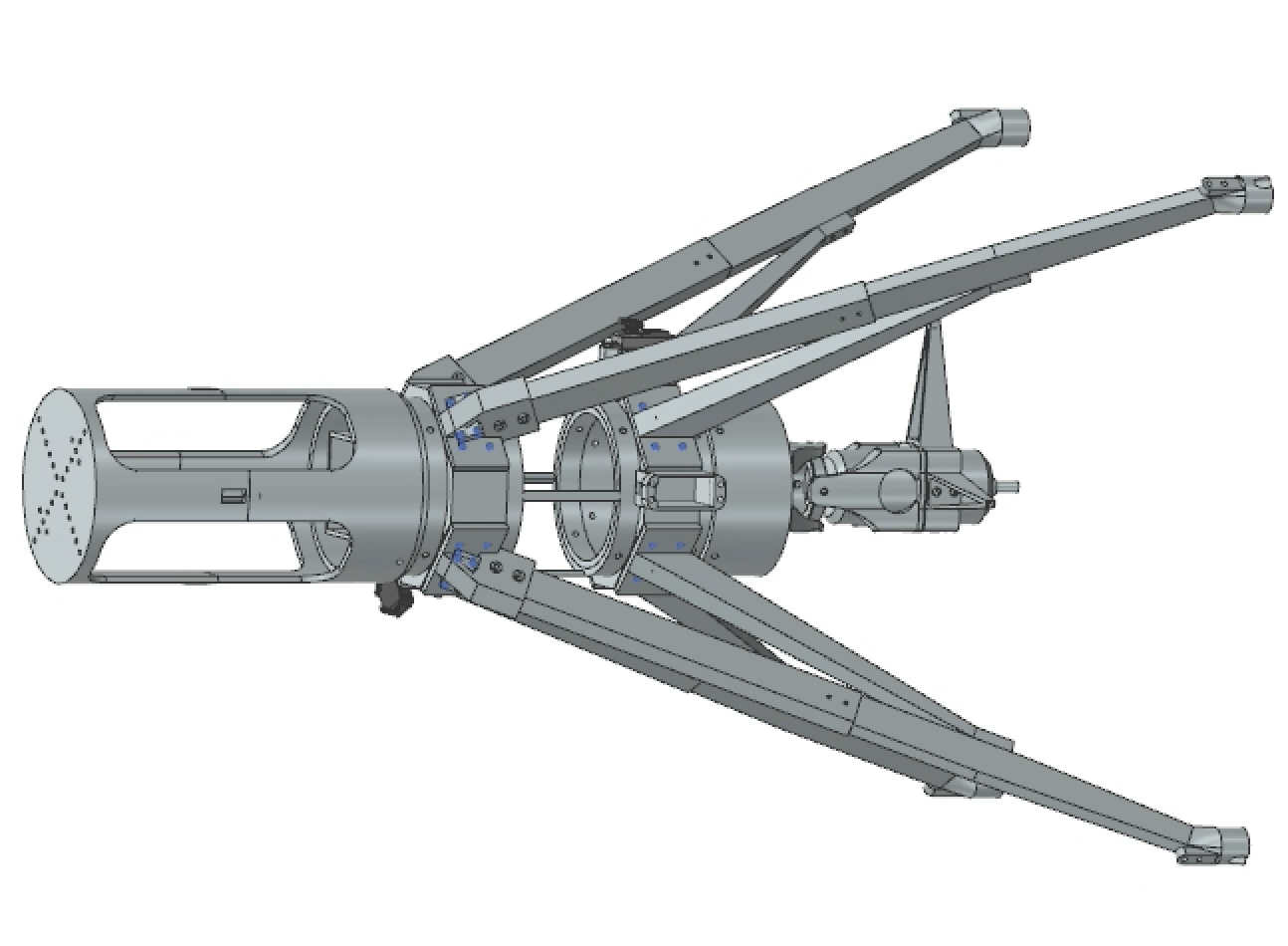
Hornet was developed by LPL in 2025 as a drone testbed for a variety of avionics, sensor, and controls testing. Hornet was carefully designed to match the hopper's weight distribution, changing mass as fuel would burn, and even the internal movement of liquid propellant. The design for the drone is modular and supports adjustable ballasts for a changing center of mass. Its flight motor, TVC servo motors, and additional roll motors replicate how Ranger will control thrust and orientation during flight.
Using this testbed, LPL can safely evaluate how well different control strategies perform. The onboard flight computer takes the estimated state from its sensor suite and decides how much thrust to apply and how to angle the engine to stay on course. Multiple control approaches are tested to ensure smooth, stable motion with minimal error, even when facing disturbances like wind or unexpected forces. Sensors included in this include an INU, LiDAR, and GNSS RTK systems. The avionics PCB stack is also developed internally by LPL and allows for the sensors to be used to calculate the drone's state in flight, which is then fed into the control loop for a desired trajectory.
A key goal of this system is transferability: the same software and control logic used on Hornet can be applied directly to Ranger with minimal changes. This validates performance in a low-risk environment before committing to a real hopper flight. The use of RTOS with hardware abstraction like Zephyr and the same avionics and sensors allows for an almost one-to-one transfer between Hornet and Ranger for flight. The results from Hornet testing will be validated on Ranger in the upcoming months during the vehicle static fire and the first flight.